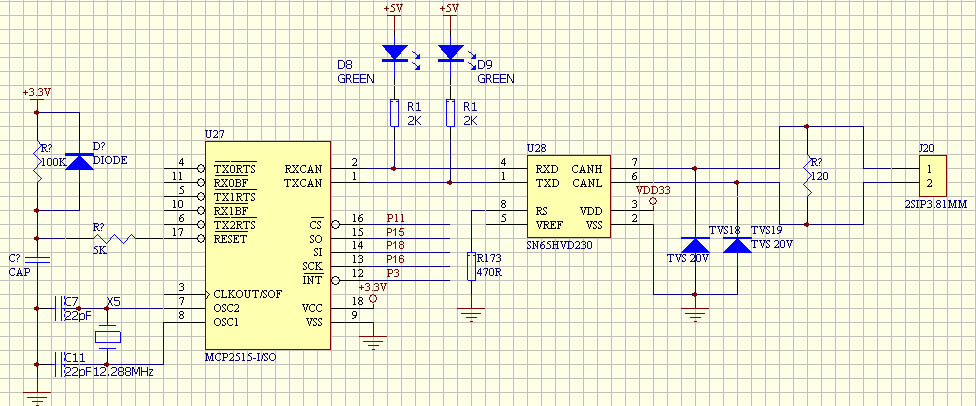
Figure 1: CAN Bus of ez430 schematic
As showed above figure, MCP2515 is a stand-alone CAN controller with SPI interface. ez430 connects to MCP2515 through SPI interface to put in CAN bus devices to send and receive command to/from BBB board. MCP2515 supports CAN V2.0B at 1Mb/s.
MCP2515 output is TTL (+3.3V) level, a transceiver is required to convert TTL level to CAN bus standard. I use SN65HVD230, it is 3.3V CAN transceivers.
Figure 2: ez430 and CAN Bus board
ez430 board is used to control 2 motors, speed and direction through CAN bus connected to BBB board.
No comments:
Post a Comment